Pressure and Hydrostatic Pressure
On the most fundamental level, pressure is the effect of molecules colliding. All fluids (liquids and gases), have molecules moving about each other in a random chaotic manner. These molecules will collide and change direction exerting an impulse. The sum of all the impulses produces a distributed force over an area which we call pressure. Pressure has units of pounds per square inch (psi).
There are actually three kinds of pressure used in fluid dynamics. They are static, dynamic, and total pressure. The pressure described in the first paragraph is static pressure. Dynamic pressure is the pressure measured in the face of a moving fluid. Total pressure is the sum of static and dynamic pressure. If a fluid is assumed to be at rest, dynamic pressure is equal to zero. The pressures we will be using in this course will be based on fluids being at rest.
Consider a small object sitting in water at some depth, z. If the object and water are at rest (velocity equals zero), then the sum of all forces acting on the object is zero, and the dynamic pressure acting on the object is zero. The pressure that the water exerts on the object is static pressure only; in the analysis of fluids, this static pressure is referred to as “hydrostatic pressure.” Hydrostatic pressure is made up by distributed forces that act normal to the surface of the object in the water. These forces are referred to as “hydrostatic forces”. The hydrostatic forces can be resolved into horizontal and vertical components. Since the object is in static equilibrium, the horizontal components of hydrostatic force must sum to zero and cancel each other out. For the object to remain at rest, the vertical component of hydrostatic force must equal the weight of the column of water directly above the object. The weight of the column of water is determined using the equation:
Weight
=
(density) × (gravity) × (volume of water)
W = ρgV = ρgAz
Where:
ρ
= water density (lb-s2/ft4)
g
= acceleration of
gravity (ft/s2)
A
= surface area of the
object (ft2)
z
= depth of the object
below the water’s surface (ft)
Therefore,
the hydrostatic force acting on an object at depth, z is equal to:
Fhyd
= ρgAz
Dividing
hydrostatic force by the area over which it acts yields the hydrostatic
pressure acting on the object:
Phyd = ρgz Þ Fhyd = Phyd × Area
This
equation can be used to find the hydrostatic pressure acting on any object at any depth. Note that hydrostatic pressure varies linearly with the depth of the object.
Bernoulli’s Equation
It is useful to have a short discussion of external fluid flow. This is the situation that occurs when water flows around a ship’s rudder, submarine planes, hydrofoils, or the hull of any vessel moving through the water. The study and analysis of fluid flow is a complex subject, a subject that will baffle researchers for many years to come. However, as students of naval engineering, you should have some basic knowledge of external fluid flow.
Consider a fluid flowing at some velocity, V. Now, think of a line of fluid molecules that are moving in a direction tangent to the fluid’s velocity. This line of movement is referred to as a streamline. One method of flow analysis is to consider the fluid to be made up of many streamlines, each layered on top of the other. We will be looking at a group of fluid molecules traveling along one streamline. To further our analysis of the fluid, the fluid flow is assumed to be incompressible, meaning that its density is not changing anywhere along the flow, and that there is no contraction or dilation of the fluid molecules. If the water molecules are not rotating, the flow is called irrotational and the fluid is said to have a vorticity of zero. If there are no shearing stresses between layers of the flow, the fluid is said to be inviscid. Finally, if we assume that a fluid’s properties at one point on the streamline do not change with time (although the fluid’s properties can change from location to location along the streamline), the fluid flow is said to be steady. In this course, our analysis will assume steady incompressible inviscid flow.
For steady incompressible inviscid flow, the sum of the flow work plus the kinetic energy plus the potential energy is constant along a streamline. This is Bernoulli’s Equation and it can be applied to two different points along a streamline to yield the following equation:
The
“p/ρ” term in the equation is the flow work at any point on the
streamline, the “V2/2” term is the fluid’s kinetic energy at
any point on the streamline, and the “gz” term is the fluid’s potential
energy at any point on the streamline.
Using
Bernoulli’s equation, we can explain why lift and thrust is generated by flow
over hydrofoils, rudders, submarine planes, and propeller blades. We can also
describe the pressure distribution of fluid flowing around a ship’s hull.
Definition of a Ship’s Axes and Degrees of Freedom
A ship floating freely in water is subject to six degrees of freedom (exactly the same as an airplane flying in the sky). There are three translational and three rotational degrees of freedom associated with a ship. As a quick review, translation refers to motion in a straight line and rotation refers to rotating or spinning about an axis.
In naval architecture, the longitudinal axis of a ship (meaning from bow to stern or stern to bow) is always defined as the x-axis. Motion in the longitudinal direction is referred to as surge. The x-axis of a ship is usually defined as the ship’s centerline with its origin at amidships and the keel. Therefore, positive longitudinal measurements are forward of amidships and negative longitudinal measurements are aft of amidships. Rotation about the x-axis is referred to as roll. Figure below shows the 6 degrees of freedom of a ship. There are also two static conditions of rotation about the x-axis. These are list and heel. List is a condition produced by a weight shift on the ship. Heel is a condition produced by an external force such as the wind.
A ship’s y-axis is used for measurements in the transverse or athwartships (port and starboard) direction. The y-axis has its origin at the keel and on the centerline. Naval architecture convention states that the positive y-direction is starboard of the centerline and that negative measurements are port of centerline. Translational motion in the y-direction is referred to as sway, and rotational motion about the y-axis is pitch. The static condition of rotation about the y-axis is referred to as trim. Similar to list, trim is a condition produced by a weight shift on the ship.
Vertical measurements in a ship are referenced to the keel. Therefore a ship’s vertical or z-axis has its origin at the keel and centerline. For most ships, the keel is also the baseline for vertical measurements. Translational motion in the z-direction is referred to as heave, and rotational motion about the z-axis is yaw.
As seen in the above paragraphs, the customary origin for a ship’s coordinate system is on the centerline, at the keel and amidships. Sometimes, for ease of computation, the longitudinal origin may be placed at the bow or stern.
 |
| Figure: A ship’s axes and degrees of freedom |

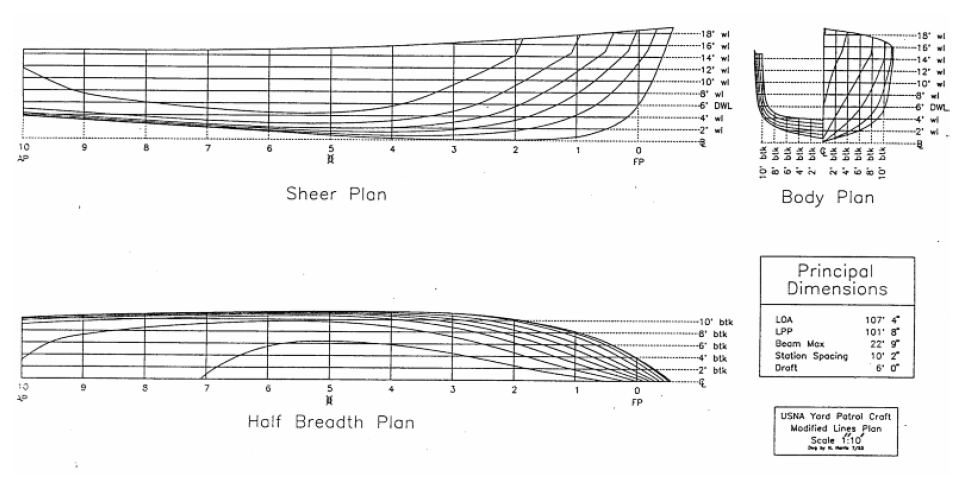










 The station midway between the perpendiculars is called the midships station, usually represented by the symbol. The length between perpendiculars has the symbol “Lpp”. Engineers typically use the Lpp for calculations. There is also an overall ship length “LOA” that might be a more useful number to use if you were docking the ship. Figure below displays these hull form characteristics.
The station midway between the perpendiculars is called the midships station, usually represented by the symbol. The length between perpendiculars has the symbol “Lpp”. Engineers typically use the Lpp for calculations. There is also an overall ship length “LOA” that might be a more useful number to use if you were docking the ship. Figure below displays these hull form characteristics.



